(本文编译自electronicdesign)
数字反馈控制被广泛应用于控制各类设备,这些设备统称为被控设备(DUC),例如电机、温度系统、伺服执行器、系统压力调节器和流量控制器。数字反馈控制设计的目标是确定传感器的模数转换器(ADC)和控制器的数模转换器(DAC)所需的性能标准。
在传统的模拟控制器中(如图1所示),信号是成比例的电压,由基于运算放大器的电路进行处理,这些电路实现了核心的控制环路功能,即增益/乘法、求和/加法、差分/减法、微分和积分。相比之下,数字控制器对数字数据流执行控制计算,其控制算法通过数字逻辑硬件实现,或运行在微控制器(MCU)或可编程逻辑控制器(PLC)上的代码中。
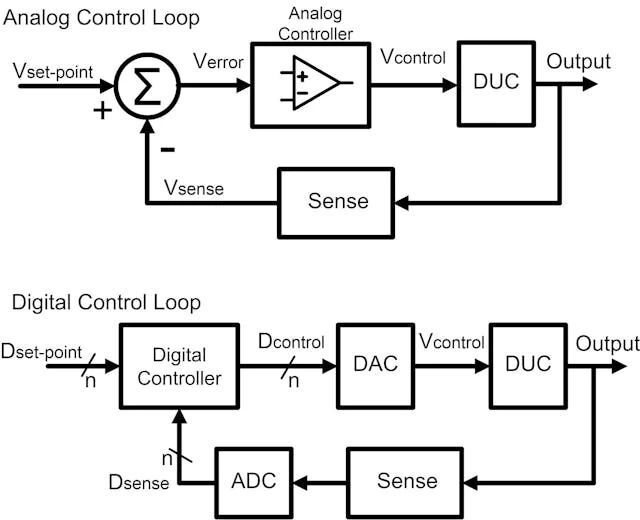
图1:传统的模拟控制通常在整个系统中采用比例电压。而使用数据流的数字控制环路则允许通过基于代码的方式轻松修改控制算法。
数字控制器通过合适的数字硬件和软件来模拟这种模拟控制器的行为。它们要求ADC和DAC具备足够的性能,能够以适当的时间分辨率和幅度分辨率捕捉并调控被控设备(DUC)的行为。
转向数字控制器
尽管许多集成电路仍在特定应用中采用模拟反馈,例如偏置控制、电压调节、锁相环(PLL)或自动增益控制(AGC),但通用嵌入式控制器和工业控制器已转向数字实现,以获得更高的灵活性和集成度。数字系统对模拟系统的仿真意味着,数字系统必须充分再现模拟功能,而ADC和DAC则构成了数字控制器与现实世界之间的关键接口。
在实际的工业环境中,大多数数字控制器并非严格依赖经典控制理论的数学方法,而是采用比例-积分-微分(PID)控制单元,其参数整定通常通过经验来完成。MCU和PLC通常能够在内部完成完整的数字PID实现,这使得它们具有成本效益高、效率高且易于通过软件参数修改进行整定的特点。
数字控制设计中必须考虑几个关键因素:
虽然前两项考虑因素都适用于模拟系统和数字系统,但ADC和DAC的具体性能在数字实现中尤为重要。传感器精度应高于所需的被控设备(DUC)输出精度,并且控制算法的计算精度应超过DAC性能,以避免引入新的误差。
连续时间的被控设备(DUC)信号(如图2所示)由ADC进行时间上的采样和幅度上的量化,生成输入到数字控制器的数字数据流。因此,ADC的采样率和分辨率将限制对被控设备(DUC)的感知和控制精度。估算合适的ADC采样率通常需要考察被控设备(DUC)的时域阶跃响应——ADC的幅度分辨率越高、单位时间内的采样次数越多,数字系统所能实现的控制就越精细。
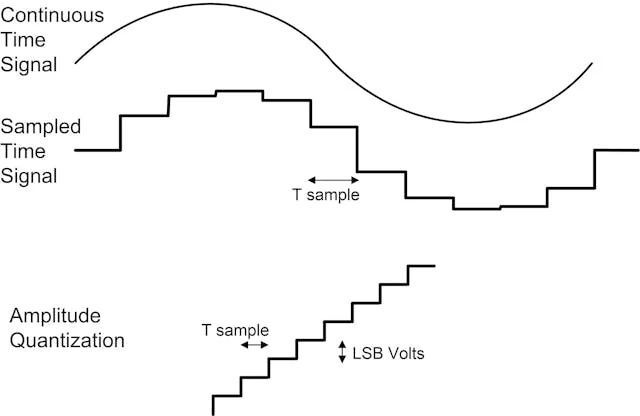
图2:数字控制所使用的信号既经过时间上的采样,又经过幅度上的量化。为了准确地表示这些信号,需要同时确定采样率和幅度分辨率。
DUC的测试设置
在控制系统设计中,被控设备(DUC)的稳定性是一项关键特性。反馈控制环路能够改善被控设备的稳定性,但这种改善仅在其带宽范围内有效。被控设备中那些超出控制系统带宽的高频变化无法得到补偿。
图3展示了一种测试设置:在稳定且无干扰(例如无负载或温度变化)的环境中,固定的输入应当产生固定的被控设备输出,压控振荡器(VCO)就是一个例子。即便输入的模拟信号稳定,其固有的相位噪声和频率抖动也可能导致输出频率出现变化。
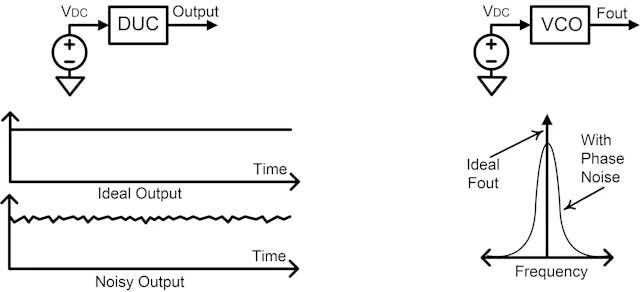
图3:应对被控设备(DUC)的稳定性进行检查。控制环路可以改善DUC的稳定性,但这种改善仅局限于环路的带宽范围内。高频不稳定性可能会带来问题。
DUC的直流传递函数描述了输入(例如电压)和输出(例如频率)之间的关系,它决定了所需的DAC分辨率(如图4所示)。通过将系统要求的输出精度范围映射到对应的DAC输入值范围,就可以确定DAC所需的最小步长(即最低有效位LSB)。为了实现稳健设计,建议在所需的精度窗口内至少包含8个或更多的DAC LSB步长。
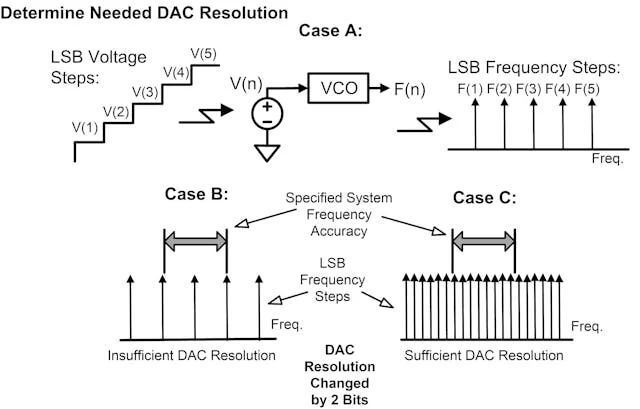
图4:控制DAC的最低有效位(LSB)分辨率应足够小,以确保多个LSB步长所产生的输出能够落在系统规定的精度要求范围内。
一种测试设置(案例A)是向被控设备(DUC)输入一系列电压阶跃信号,并对输出频率进行测量。输入信号应来自低噪声直流电源,以完全隔离并仅测试DUC的性能。如果初始分辨率不足(如案例B所示),增加DAC的位数可改善性能,如图4中的案例C所示。
如果系统的精度范围内包含多个DAC的LSB步长,就会产生设计余量,这能保护设计免受微小误差或漂移的影响。然而,如果DAC的分辨率不够,控制系统在闭环运行中可能无法达到被控设备(DUC)所需的精度。
如图5所示,对于固定的数字输入,DAC的输出理想情况下应保持稳定。有些DAC(尤其是采用脉冲宽度调制(PWM)的DAC)会产生纹波,若输出偏差超过了DAC的LSB,LSB 分辨率就变得无关紧要了。
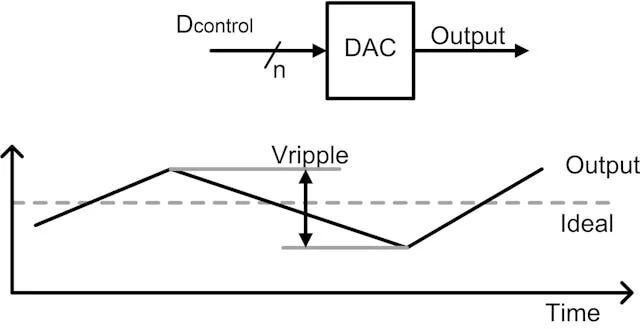
图5:还应检查控制DAC的非理想性能。理想情况下,固定的数字输入会产生固定的电压输出。然而,输出偏差(通常称为“电压纹波”)可能存在。这是PWM DAC存在的一个常见问题。
ADC的作用
ADC的作用是将被控设备(DUC)传感电路的输出进行数字化处理,其分辨率、可重复性和精度需超过系统的整体精度要求。采用与确定DAC分辨率相同的方法,ADC的分辨率应设定得比期望的DUC输出分辨率更高。
确定ADC的采样率需要格外谨慎。尽管控制工程教材会将ADC采样率与控制环路的带宽关联起来,但在实际应用中,参考DUC的阶跃响应(如图6所示)是一种行之有效的方法。
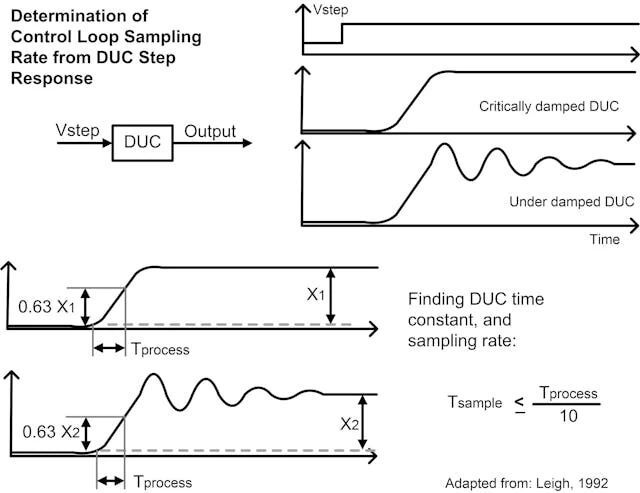
图6:被控设备(DUC)对阶跃输入的响应速度决定了控制环路所需的采样率。响应迅速的DUC比反应迟缓的设备需要更高的每秒采样数,以提供合适的反馈数据。
开环阶跃响应反映了DUC对突发输入变化的反应,它揭示了关键的时间常数(即过程时间,Tprocess)。一个实用的指导原则是:设置采样周期(Tsample),使其在过程时间(Tprocess)内至少能采集10个样本。这能确保控制器准确感知系统动态,并做出适当反应。
在DUC的中点工作范围内施加阶跃输入,可确保得到有意义的特性分析结果。例如,对于输入范围为0至1V的DUC,施加一个从450mV到550mV的阶跃信号,可避开在极值处可能存在的非线性问题。
一旦确定了ADC的最小位深和采样率,就可以选择合适的转换器,目标是使其性能达到或优于计算得出的要求。所选ADC的最大采样率会决定环路的运行速率。随后,可以选择具有匹配或更优分辨率和速度的DAC,以支持输出端的工作。
这些方法使设计人员能够确定数字控制环路中ADC和DAC的性能,从而支持多种可能的控制算法——从PID到更复杂的算法或自定义算法。